本物のロボティクス学習をすべての子ども達に
りょうすけ(Leadsonic 雲南大東教室)
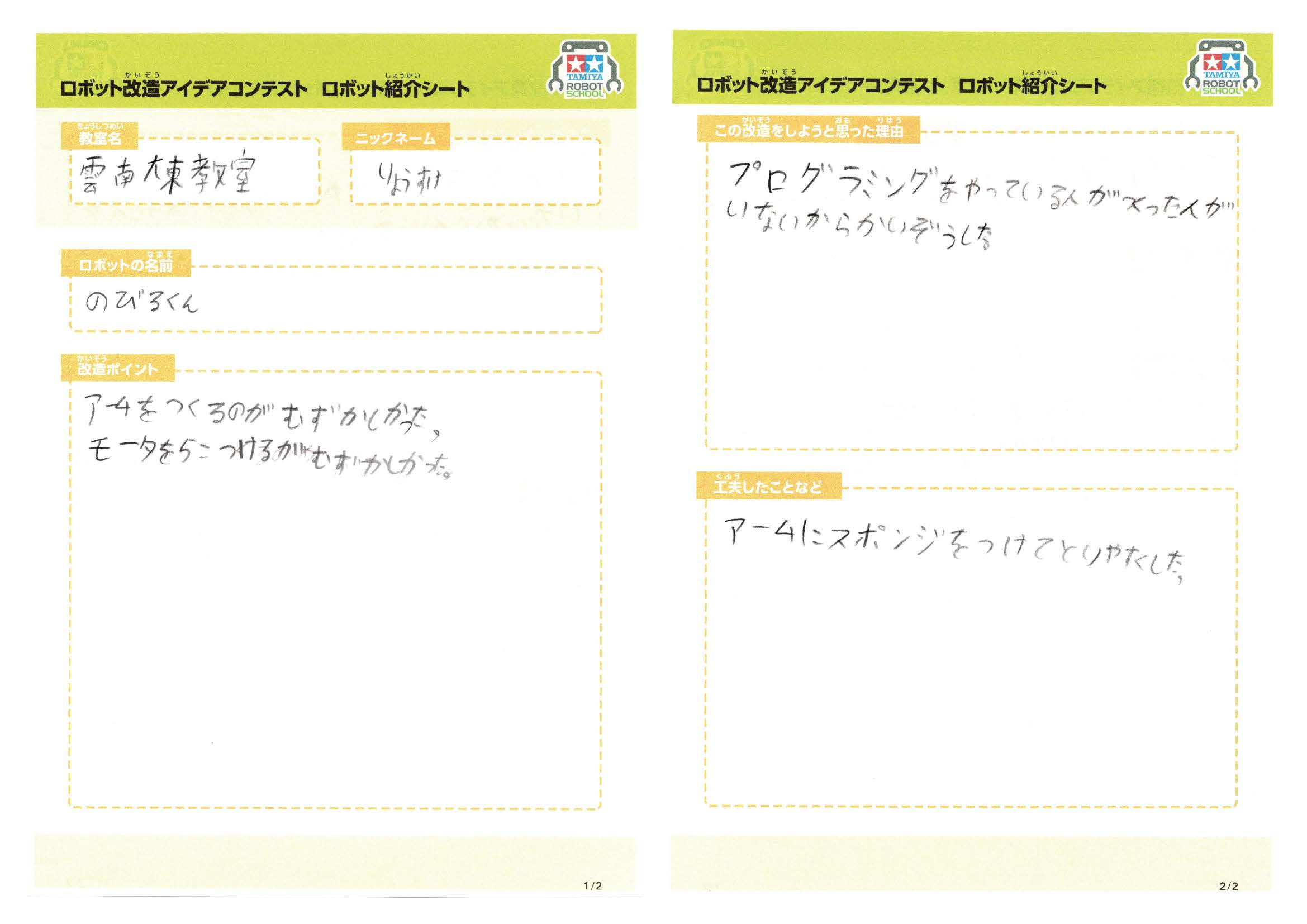
ロボット紹介シート
「アームを伸ばして相手エリアにアイテムを入れたい」そのための構造をいろいろ探し、まだ習っていないパンタグラフ構造に挑戦しました。同時に左右のアームを動かすこと、アイテムをつかんだ後に中央の壁を超えるためにアームを上下させること、しっかりアイテムをつかめる素材と形状を見つけることを、最後まで取り替えたり位置をずらしたりとあきらめずに挑戦することができました。
前のページに戻る
No.XXX
開催中の体験会を探す
 ロボット紹介シート
ロボット紹介シート