 ロボット紹介シート
ロボット紹介シート
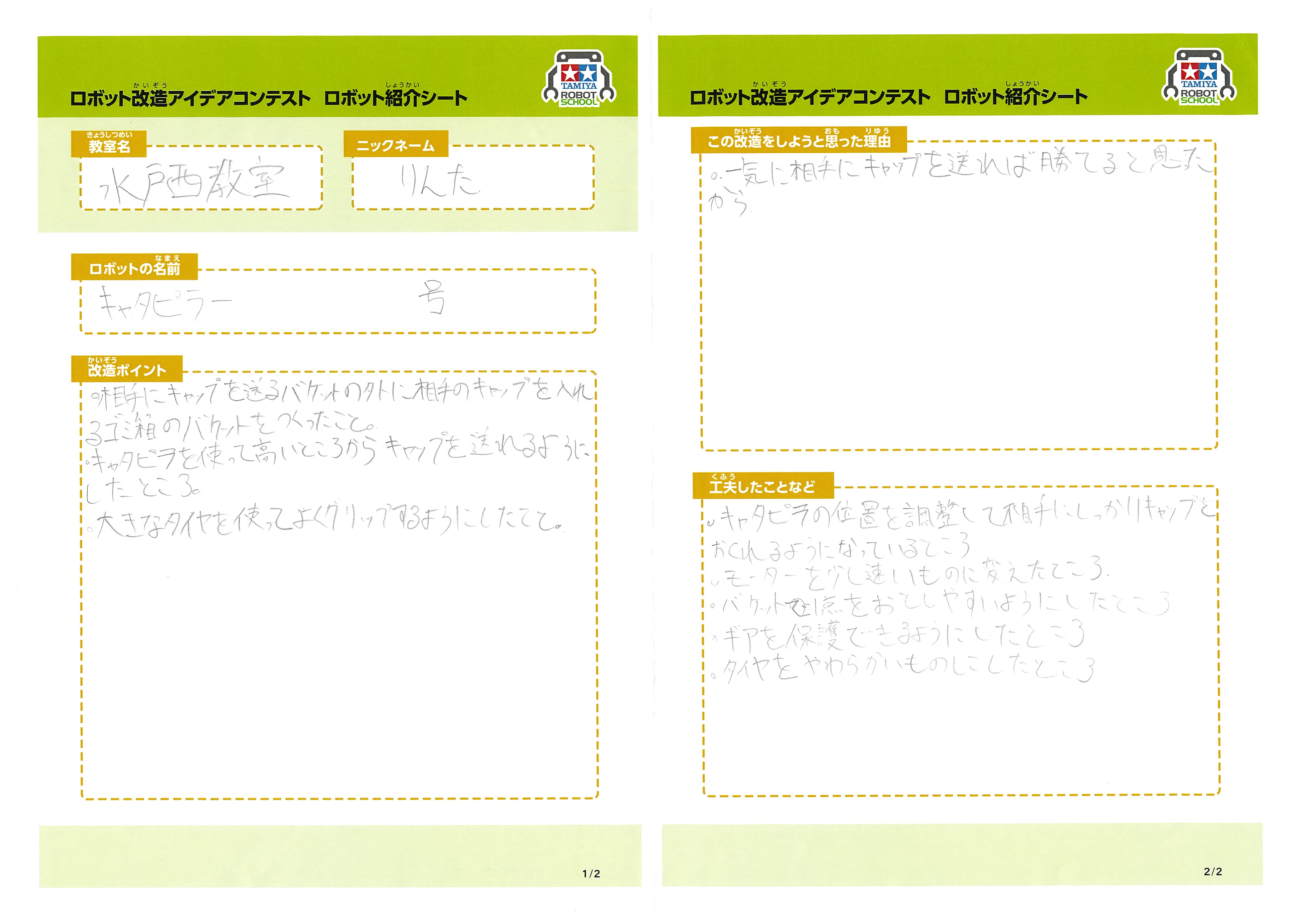
以前のコンテストにノミネートされていた作品から着想得て完成しました。
履帯を使うことで、バケットの軌道を自由に変えられギアボックスよりも短い範囲でより遠くにキャップを落とす事が可能になっています。
マシンとのバランスを調整すれば、相手コートの中心に落とす事も不可能ではない!というのがポイントではないでしょうか。
夢がありますよね。
高い所から落とされるキャップ攻撃は、相手からしたら恐怖しかないですよね!
ベルトコンベアー式を動かすにはパワーが必要ですが、モーター交換や適切なギヤ比の選択で勢いよくキャップが流れていきます!
あと全体的に無駄が見当たりません。前面のキャップ集めに、相手からの攻撃を考慮したキャップの受け皿。要所に効率的な機能が実装されていてオールマイティな仕事っぷりが期待できます!
加えて、手足のように動かす操縦の様子から人馬一体感がにじみ出ていて、唯一無二なロボットに仕上がっています!
![]()
No.XXX