こちらはロボットプログラミングコース応用クラス2019年10月生
なので、やってることがすごいです!「無線でカムロボを動かそう」です!!
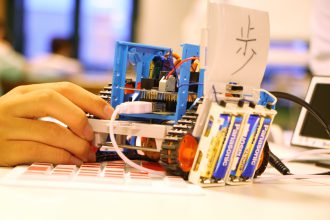
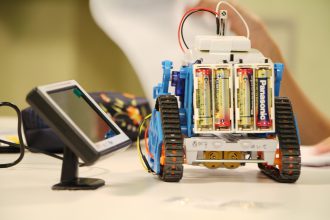
まずはお互いの役割を決めて、それぞれのカムロボの頭に送信装置と受信装置を設置。
今回はAYUMUが送信、MEISAが受信となりました。


当初向かい合って行っていましたが、AYUMUが送ったものがMEISAの画面に映るのが見えないので(笑)、
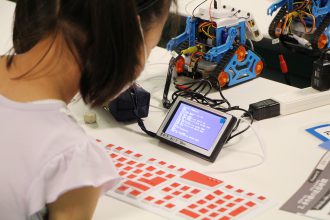

隣同士で無線送信というシュールな画となりました。笑笑


繊細な位置決めも大切なこの送受信。もちろんプログラミングが正確でなければいけません。
はかせチェックが入ります!


とはいえ1年半いっしょに頑張って来た仲間。見事にAYUMUからの指令をMEISAがキャッチし、カムロボの手が上がりました~~~~~~~~~~~~!すばらしい!!
自由製作水戸教室二連覇に向け、また一つステキな技を身につけました(笑)。
これからもいろいろ身につけてがんばろう!で、このポーズは何??



