こちらロボットプログラミングコース応用クラス。今日も元気にスタートです。
今回のテーマは「カムロボのスピード調整つまみをつけよう!」とは?
まずはボリュームを使って「抵抗値」について学んで行きます。
先生同士でも理解を深めます(笑)
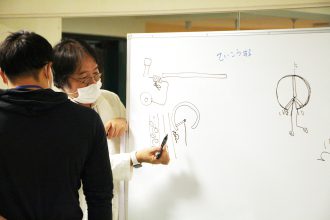
LEDの光りの強さが抵抗値によって変化することを確認して、それをカムロボの制御に活かしていきます。
PWMコマンドは電気を高速でONOFFするコマンド。このコマンドを使ってプログラミングです。

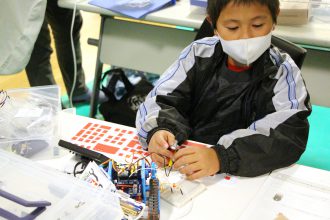



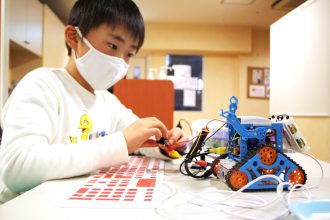
こんな難しいのにさすが応用クラスの猛者たち。着々と内容理解し、問題を解き、ゲームをプログラミングし、ちょっと遊び、次のステップへ。


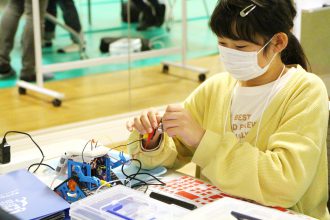
次のステップはカムロボに調整つまみを付けてカムロボのスピードをコントロール。
これもみんな粛々とクリア!
ラストは「アームの角度合わせゲーム」にチャレンジだ!
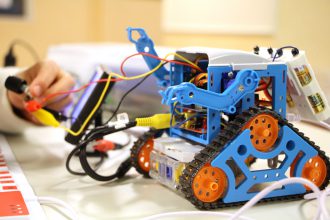
アームを調整つまみで動かして、ランダムに動くようにプログラミングした右腕の動きに合わせるというもの。
これが案外難しくてたのしい!マスターもやらせてもらっちゃいました!(笑)


そんな中、HAYATEが40回という驚異の数字をたたき出したぞ!

ライバルたちもだまってはいられない。AOIは「家でもチャレンジしてくる!」と言っておりました。
こうしてお家に持ち帰って、そのままできるのもタミヤロボットスクールの強み。
みんなもしっかりお家でやってみてね!

たのしくみんなで切磋琢磨。難しいこともみんなとならば越えられる!
次もがんばろう!


