ロボットプログラミングコース応用クラスです。
今回はタイトルにあるように、何だか難しそうな課題に取り組んでいきますよ。
まずは、めったにないSHIHOのまもることやくそくからスタートです(笑)
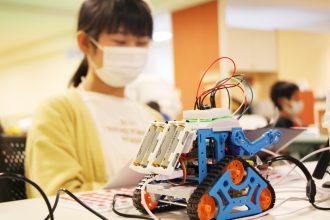
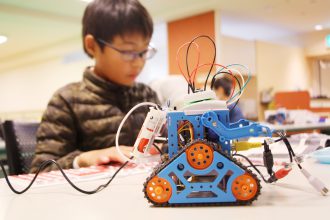
その後はさっそく「加速度センサー」を使ってかたむきの変化を見る準備に取り掛かります。今回使う加速度センサーは上下左右前後と3つの方向が測れるもの。この加速度センサーをミニブレッドボードにつなぎます。このミニブレッドボードを可愛くカムロボの頭に載せてあげるよ!(笑)加速度センサーの足にはそれぞれ役割があるので、キチンと配線することが大事。みんな真剣な顔で取り組んでいますね!

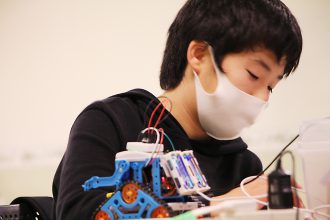
配線が無事できたら、いよいよプログラムを入力していきます!入力したらカムロボを動かしながら加速度の変化を確認。さ~みんなちゃんと動いているかな??
キチンと反応しているのを確認したら今度はプログラムを変更して左右のゆれの値を測っていきますよ!



OK!OK!ではどんどん行きますよ!
次はこの傾きやゆれを知らせてくれるためのプログラミングだ!光と音で伝えてくれるようにしていくよ!




前後左右のかたむきに反応するように無事プログラミングできたかな?
それでは本日のゲーム「はみださずに操れ!カムロボレースゲーム」をつくろう!!
さすが応用クラスみんなどんどんゲームを完成させていくぞ!そしてゲームでの競い合い(笑)マスター負けっぱなし…。



次回もゆれやかたむきを引き続き調べていきますよ~
きょうじゅと語るSHIHO。何を語る???笑



