メカニックコース応用クラス。
GWを挟んで約1ヶ月ぶりの応用クラス。久しぶりにクラスの子たちを見ましたね!元気そうで何よりです。
今日の「まもることやくそく」は、KIYOTOです。
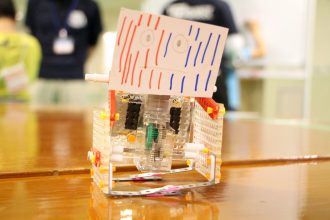
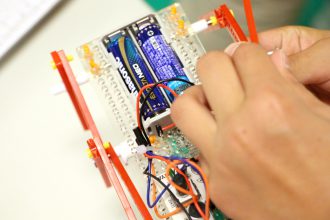
前回、何をやっていたか? 音センサー歩行ロボットの製作途中でした。今日は、出来たロボットを使って6足、4足、2足どれが1番速いか競走です!
競走するためには、ロボットが完成しないといけません!なので、さっそく作っていきましょう!



久しぶりに会って嬉しいのか⁉みんなお友達が気になってしょうがいない様子。
それでも作る手が止まらない所を見ていると、みんなの作る力の成長を感じます。


全員が完成したところで、今日の本題「1番速いのはどれか」競走です。





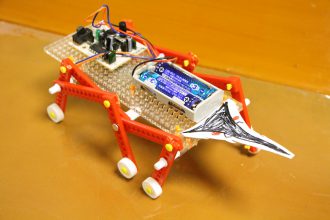
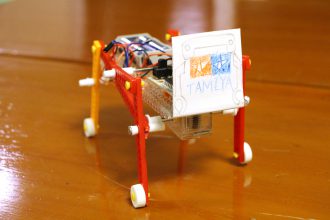
一斉にスタートし、1番最初にゴールしたのは「6足歩行ロボット」でした。
その後は、各自でロボットを改造したり、競走したしながら楽しみました。


最後は、いつも通りワークシートの発表。
みんな、競走したから「6足歩行ロボット」が1番速いのが分かった。と書いてくれました。
でも何で6足が速いのか?
まではわかりません。次回は、そこを考えましょう!
【 改造作品 】