ロボットプログラミングコース応用クラスです。
応用クラス1回目の「まもることやくそく」はREIKIに読んでもらいます。
さぁ~まずは、応用クラスで使う教材セットを配ります。
しっかりと名前を書いてね。




そして、応用クラスについてきょうじゅから説明してもらいます。
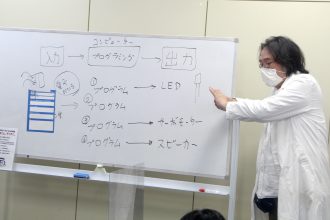
応用クラスでは、基礎で学んだプログラミングに新たに「電子回路」が加わります。
電子回路は、ロボットにとってとても大切な物です。
ロボットの定義は
・センサー
・制御系
・駆動系
この3つを持つ機械です。
今まで勉強して来たプログラミングは「制御系」ですね。「センサー」や「駆動系」はカムロボについていた距離センサーやモーターとかだよ。そして、電子回路はこの3つを繋げる役割があります。カムロボを作る時に苦労したコード繋いだりした部分が回路です。
みんなは、いよいよ「ロボット」について学ぶ時が来ました‼



説明を聞いて電子回路について理解した後は、最初の電子回路についての授業にいくよ!
最初にやる事は「カムロボからIchigoJamを取り外す」です。
みんな「え~カムロボもう使わないの(゚Д゚;)⁉」とビックリ。
みんなの相棒は少しの間お休みです(半年後にまた会おう!!)
取り出したIchigoJamを使って、LEDを点灯させる回路を作ります。
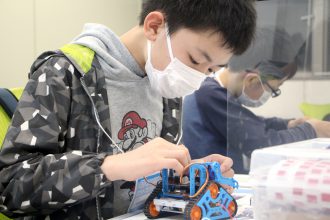


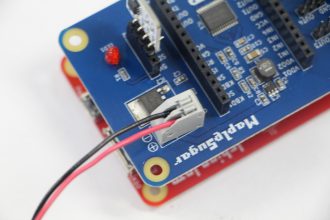


テキストを確認しながら+と-を間違え無いように回路組んでいきます。3か所接点を繋げる必要があるのにみんなの手は2本。なかなか苦労しています。

見ずらいですが、ちゃんと付いてます(笑)
全員が見事LEDを点灯出来たところで今日は終わりの時間。
ワークシートを書いて発表しよう。