ロボットプログラミングコース応用クラスです。
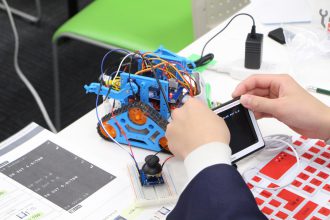
今日は、ジョイスティックでカムロボのコントローラーを作ります。
カムロボが動くのは半年ぶりです。ちゃんと動いてくれるかな?
まずはジョイスティックについて説明を聞いて、その後実際に動かします。
ジョイスティックは、ゲームのコントローラーについているやつだね。
中に傾きを調べるセンサーが入っていて、スティックの傾き加減を教えてくれます。
後は、センサーの教えてくれる傾きに合わせて、前・後ろ・右・左をプログラムすればコントローラーの完成!簡単だね(笑)
さっそく作ってみよう!





「回路を組んで、プログラミングをして動かす」
自由製作をしてから一連の流れが明らかにスムーズに出来るようになっています。
自分で1から考えた経験が活きている証だね!
しかし!回路はやっぱり難しいね。
KANATAのカムロボが動かない。原因は、回路を間違っていました。これだけ配線があると分からなくなっちゃいます。混乱しない為にもテキストと同じコードを使いましょう。

RYUTOはしゅしょーと考え中? どんな改造が出来るか楽しみだ!

久しぶりに動いたカムロボは楽しいね。やっぱりロボットプログラミングコースはカムロボがいてこそです。

最後はワークシートの発表です。
次回からもカムロボが大活躍!お楽しみ!!


