ロボットプログラミングコース基礎クラス。
今日の「まもることやくそく」はIBUKIに読んでもらいます。
今回は特別編!
カムロボをお掃除ロボットに改造します。
これまで出番の無かった「距離センサー」を使って、壁にぶつからない様にプログラムします。
これまで学んだ内容がギュッと詰まってます。なので、どうやって動いているのか考えながらやってみよう!




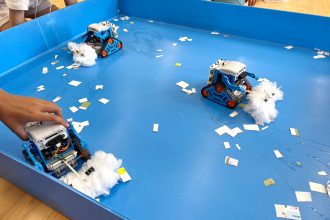
カムロボにモップを取り付け、お掃除用のプログラムを打ち込んで完成!
いざ!お掃除開始!!
予想以上にしっかりゴミを回収出来て生徒たちもびっくり!
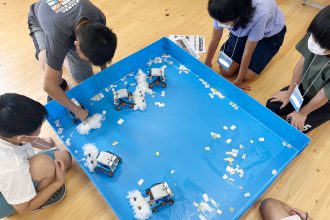

しかし、少しして問題が!カムロボが四隅の角で動けなくなっています。手で救出して再スタートしても最終的に角でストップしてしました。

実は今回のプログラムは、壁を左右交互に避けるとってもシンプルな作りになっています。
そのため角を抜け出す事ができません!
でもここからがポイント!
この角を抜け出せないプログラムを「どうやって改造すればいいか?」を考えること大切です。
全てのプログラムは、問題を見つけて修正の繰り返しです。
これからは、そこも出来るようになっていこう!


