メカニックコース応用クラス
GWが明けて初めての授業。久しぶりに顔を合わせた気がします。
それもそのはず、約1ヶ月ぶりの応用クラスですから。
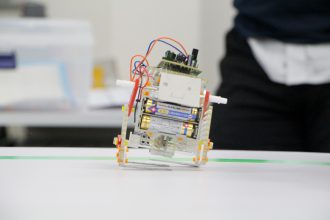
今日は、前回の続きで「音センサー歩行ロボット」を作ります。今日の目標は、完成させて、競走しよう!です。2足、4足、6足のロボットで1番速いロボットがどれか予想してみよう。
でもまずは、完成しないと始まらない。



久しぶりのロボット作りは楽しようで「先生、分からない!」とボヤキながらも作業自体は止まりません。


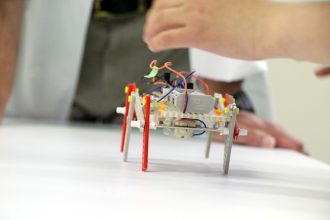

徐々にロボットも出来てきて、マスターから「かお」を付けようと提案が。
どんな「かお」が付いたのか?

みんなが思い思いの「かお」の絵を描くなか「顔」を書いて笑い取っていったTAKASHI。マスターもこれにはニッコリ!
ナイスアイデア!
全員が完成したので、いよいよスタート。
位置について・・よ~い

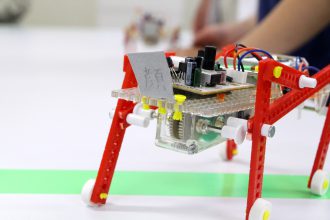
勝ったのは・・・4足歩行ロボット!
おめでとう!!
みんなで盛り上がった後は、ワークシートの発表をして終わりましょう。


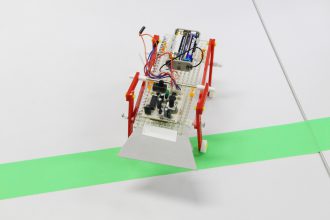
今回勝ったのは4足歩行ロボットでしたが、実は、みんなが作ったロボットの仕組みでは、6足歩行ロボットが1番速いんです。
レース中に止まってしまったので勝てませんでしたが(笑)
何で6足歩行ロボットが速いのか?については、次回にお勉強です。


