こんにちは♪
宇都宮教室からプログラミングコース1年目の授業の様子をお届けします!
みなさんのお家や学校には、テレビやエアコン、そうじ機などスイッチポンで動く機械やロボットがたくさんありますよね。
このような便利なロボットは、誰かがこんなのあったらいいなぁというアイディアと、プログラミングで作ることができちゃうんです。
そこで!今回の授業では、みんなの相棒「カムロボ」を身近にある道具とプログラミングで「おそうじロボット」に改造しました~☆
タミヤロボットスクール宇都宮教室のYouTube公式チャンネルでは、そのドキドキ?ワクワク!な授業の様子を公開中!
↓下の画像をクリックすると、動画をご覧になれます。

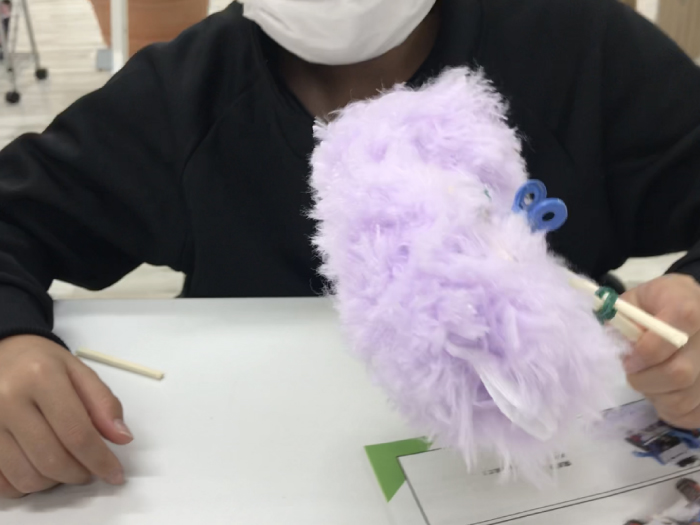
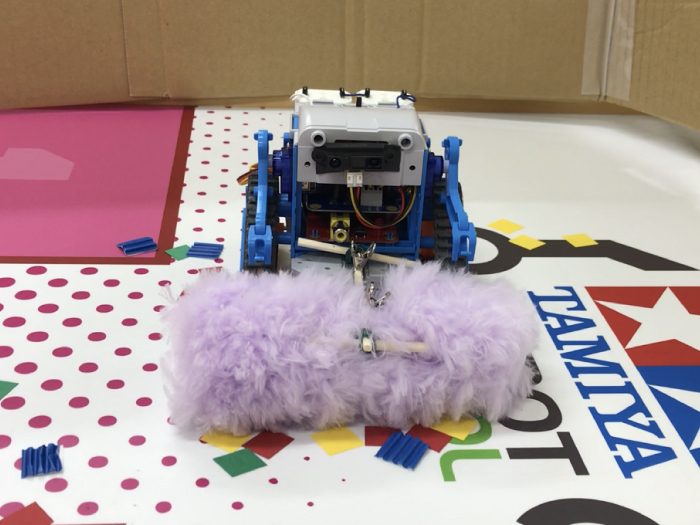
まずは、カムロボに取り付けるモフモフのモップを作ります♪このモップが肝心!
↓こちらが完成図です。
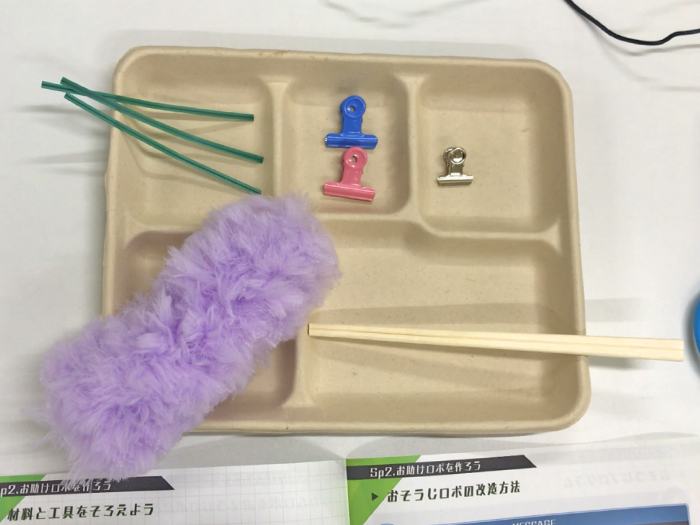
使う材料はコチラ!
この材料でお掃除ロボットが作れちゃうなんて、思いもしないですよね?
誰のアイディアなんでしょう?世の中には面白いことを考える人がいるのですね♪
わりばしは半分に割って、そのうちの1本を短く切ります。
切る前に、切る場所を間違えないようにマジックで印をつけるのが宇都宮教室流です!なんでも準備、段取りが1番。
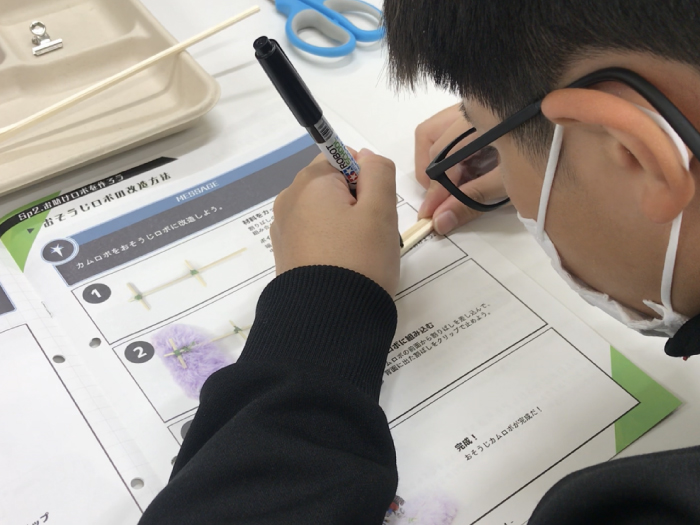
わりばしはとても堅いので、ニッパーで切りますよ~。
わりばしがどこへ行ったのか(えっ!)・・・動画を見てみてね(笑)

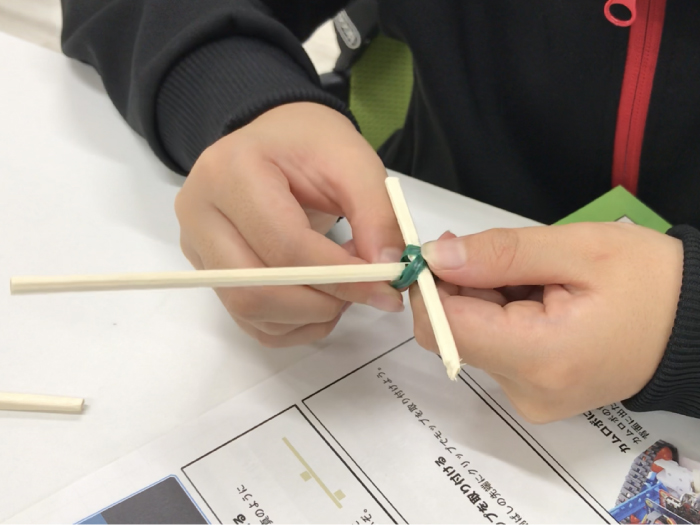
わりばしが切れたら、短いのと長いわりばしをはりがねで結びます。
外れないようにしっかり結ぶのがポイント☆ここはどんな働きをするのでしょうね?
わりばしが完成したら、先っちょにモフモフのモップをクリップでつけます。

できあがったモフモフモップをカムロボのおなかに差し込んだら…あら、完成~☆
見事おそうじロボに大変身なのであ~る!
次に、カムロボにそうじをしてもらうプログラムを打ち込んでいきます。
プログラムが完成したら実際に動かしてみよ~!
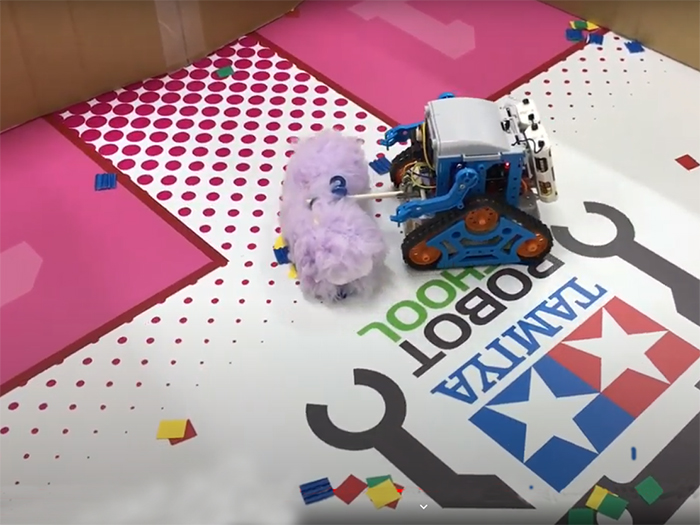
おそうじロボットを動かした様子は、ぜひ動画をご覧ください☆
壁や障害物が目の前に現れると、ぶつからずにクルリと回転して避けます。延々とお部屋のお掃除をし続けるカムロボが愛おしい。カワ(・∀・)イイ!!
でも、なんで壁にぶつからないの??その回転のヒ・ミ・ツは距離センサー!
カムロボの目が、壁に近づくと回転しろーって命令を出して、くるくると部屋中を動き回れるんです。
トライ&エラーで何度も何度も壁との距離を調整(プログラミング)して、ベストな距離を設定しているんです!
すごい!
今回の授業では、「カムロボにおそうじをしてもらいたい!」というアイディアをプログラミングで見事に作ることができました☆
タミヤロボットスクールでは、受け身のスタイルでプログラミングを学ぶだけではなく、子どもたちの発想力を活かし、トライ&エラーを繰り返しながら自分のアイディアをカタチにしていくことを大切にしております。
ご興味のある方は、お気軽に授業の見学会にお越しください♪
動画をご覧になっていただいた方は、チャンネル登録とグッドボタンよろしくお願いします。


