メカニックコース応用クラス
今日の「まもることやくそく」はIKUTO。元気良くよろしく!
前回に引き続き「音センサー歩行ロボット」の製作。の前に前回勉強したことをおさらいします。
前回の内容は・・・
・センサーってなに?
・音センサーについて
・部品の切り方
を勉強しました。覚える?



テキストを読み返して、どんな内容か確認するKEITATSU。忘れた内容は復習してしっかりと覚えていこう!
お待ちかねのロボットづくり!!






応用クラスになって変わった事。それは、先生たちが手伝ってくれないこと(笑)
手伝わないと言っても放置じゃありません。「あくまでも製作作業を手伝わない。」だけですよ。
わからない所があっても手を出さず、一緒にテキストを読み返して解決する。
応用クラスは「自分の力で考えてつくる」が目標です。
基礎クラスで1年頑張ったみんなは、それが出来る‼はず
KAZUTOはドクターと一緒にノコギリで作業中。初めて使う「万力」に戸惑いつつ、必要な部品を作っていきます。刃物は気を付けてね。

それぞれ形になってきた所で今日終わりの時間です。
ワークシートを書いて発表しよう。

次回は、みんなの作った2足・4足・6足のロボットで実験します。内容は「どのロボットが1番早いのか?」。それぞれ1番を予想してみよう。
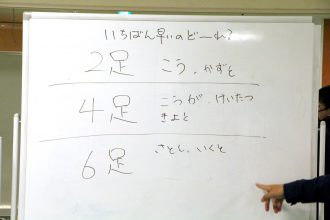
結果はこんな感じ。
答えは実際に次回やってみよう‼


