【水曜2・4週目 メカニック基礎クラス】の授業の様子です。
今回の目標は、「大型ロボットのアームを改造→キャップを掴みやすくする・たくさん掴む」です。
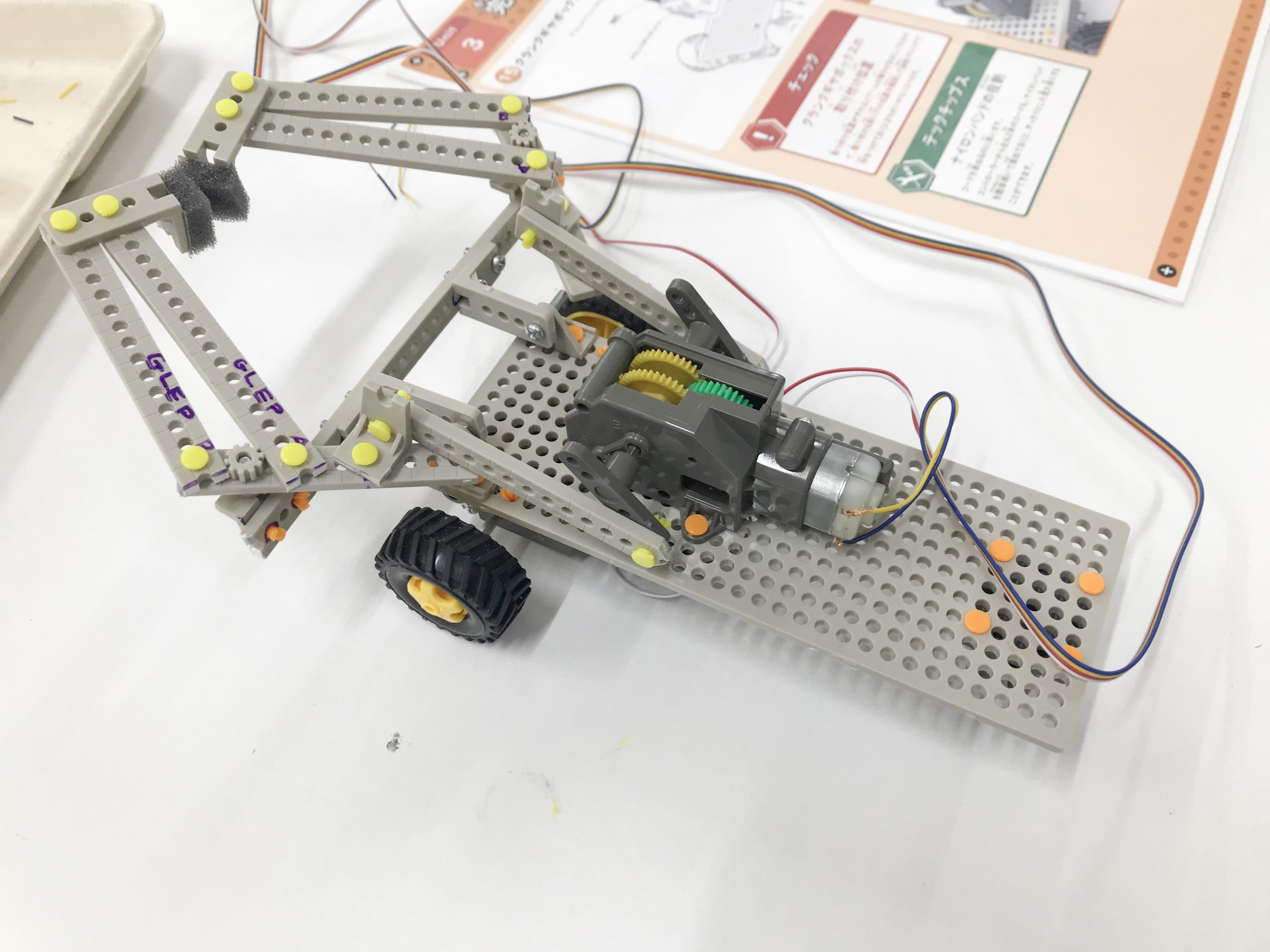
前回は、みんなこの大型ロボットを完成させるところまで進められました。
実際に動かしてキャップを掴んでみると、、アームの先っちょにあるスポンジ部分の面積が小さくて、キャップを掴みづらい事が分かりましたね。
なのでこのアームを改造し、一回でキャップをもっと掴めるように工夫してみましょう!
ここでの学びは、
1.作ってみる⇒まずは説明書通りにつくれた!
2.動かしてみる⇒キャップをつかみにくい、得点をもっと取りたい!
3.原因は?⇒つかむところが小さい!1回に一個しかつかめない。
4.どう改善しよう?⇒つかむところを大きくしてみる。1回でたくさん取れるようにカタチを変える!
5.調整する⇒厚紙やテープなどを使ってつかみやすく作り直す!
という、サイクルで進められています。

最初、「どうしよう?」「わからないなぁ」と悩む子もいました。ゼロをイチにするのはなかなか難しい作業です。
完成のお手本として、2台の参考マシンを紹介します。
掴むところのスポンジの面積を長~くしたマシンと、ハコ型のスコップをつけたマシンです!
「あ!なるほどね。」みんなイメージが湧いてきたのか「ここをこうする!・こうしたい!」とアイデアが湧き出してきます。
どうしたらキャップが掴みやすくなるのかを考えてもらってから、実際に製作します。
今回はテキスト・説明書はありません。自分たちの考えているアイデアのみでカタチにしていきます。
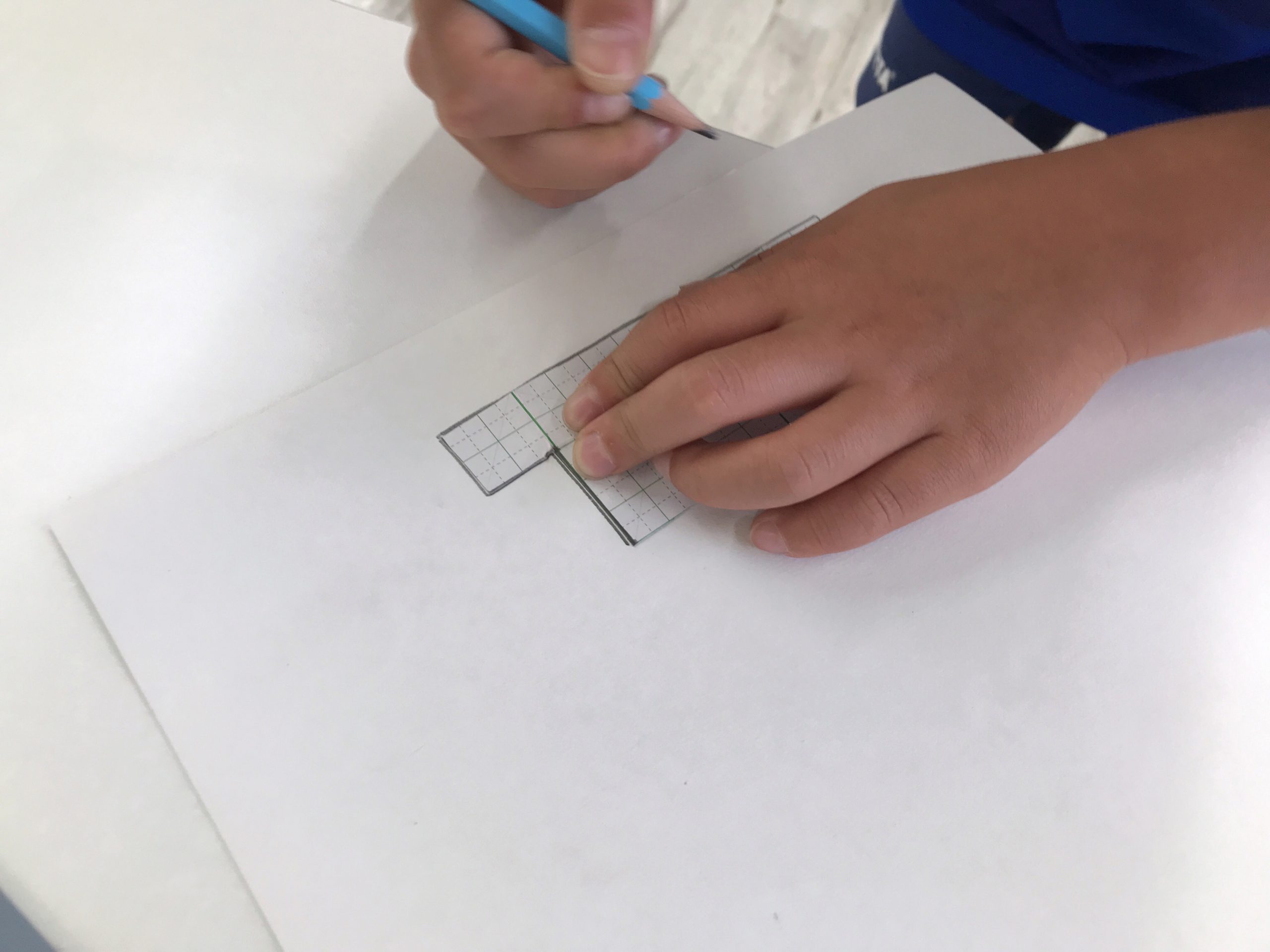
しっかり下書きをして、展開図から設計を考えていますね。なかなかスゴイ!がんばれ
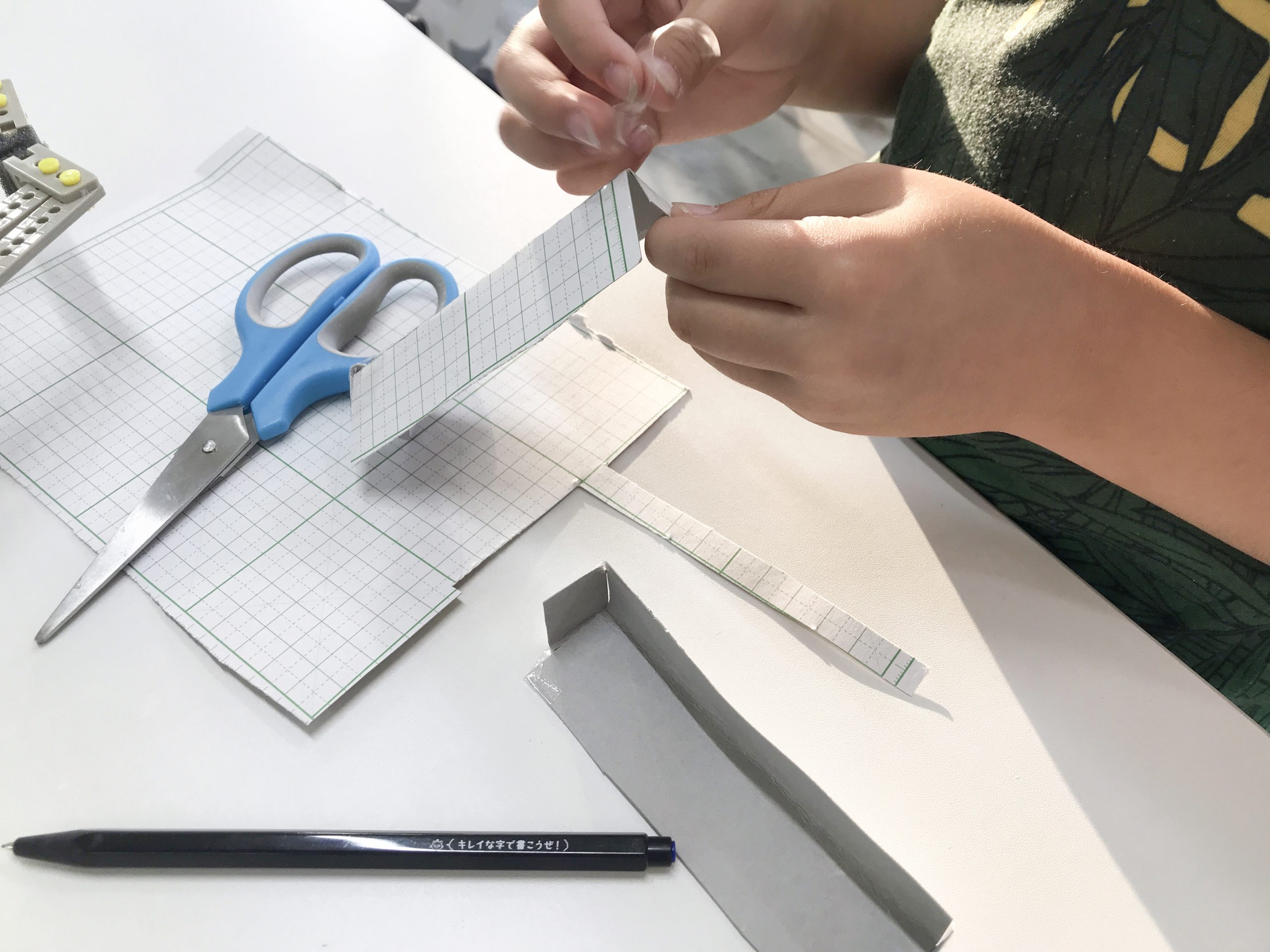
切り取ったら、展開図を組み立てていき・・・
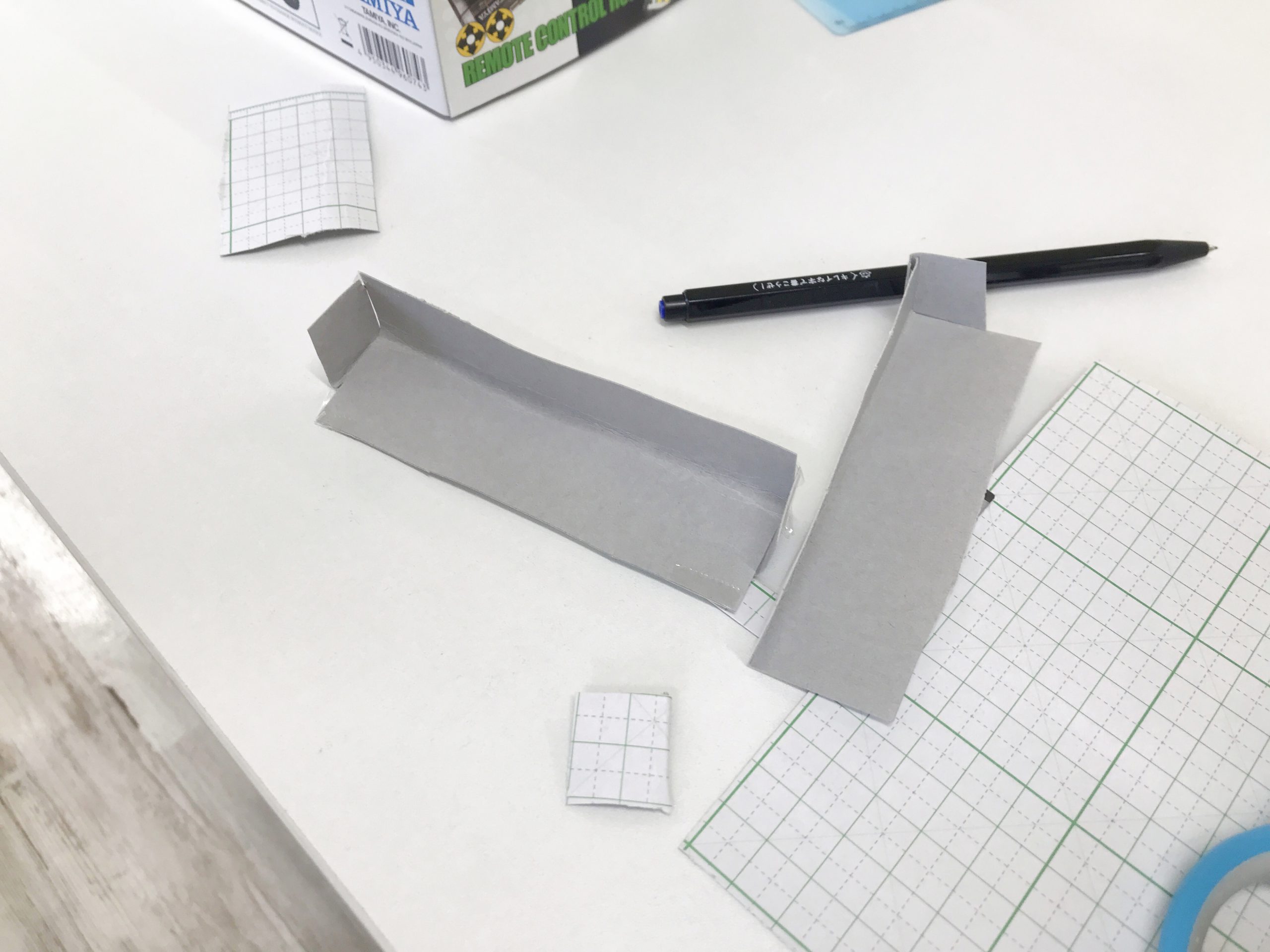
綺麗に組み立てることできました。
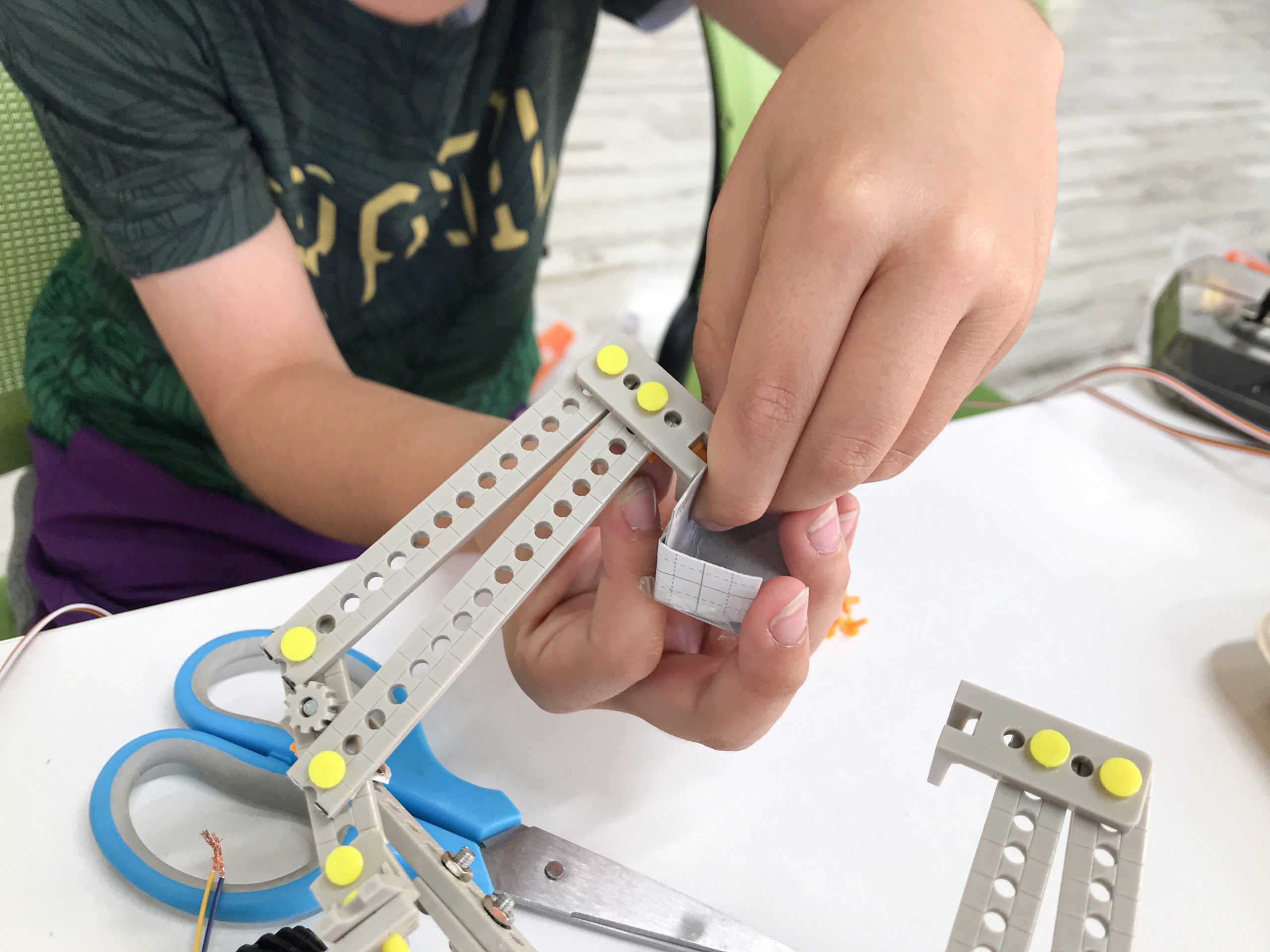
組み立てたハコを、アームへ固定するにはどうしたらいいかを考えています。
実際に手を動かしてみないと分からないことも多々あります。
「リベットで固定する!・・」とやってみると、うまく取り付けることが出来ませんでした。
「あれ?なんでだ?」都度、なんでかの原因を考え、じゃぁどうしようって工夫するの繰り返し。ちょっとやそっとの壁なんてびくともしませんよ。
(アーム根元の穴が大きく、リベットが抜けてしまい固定できません)
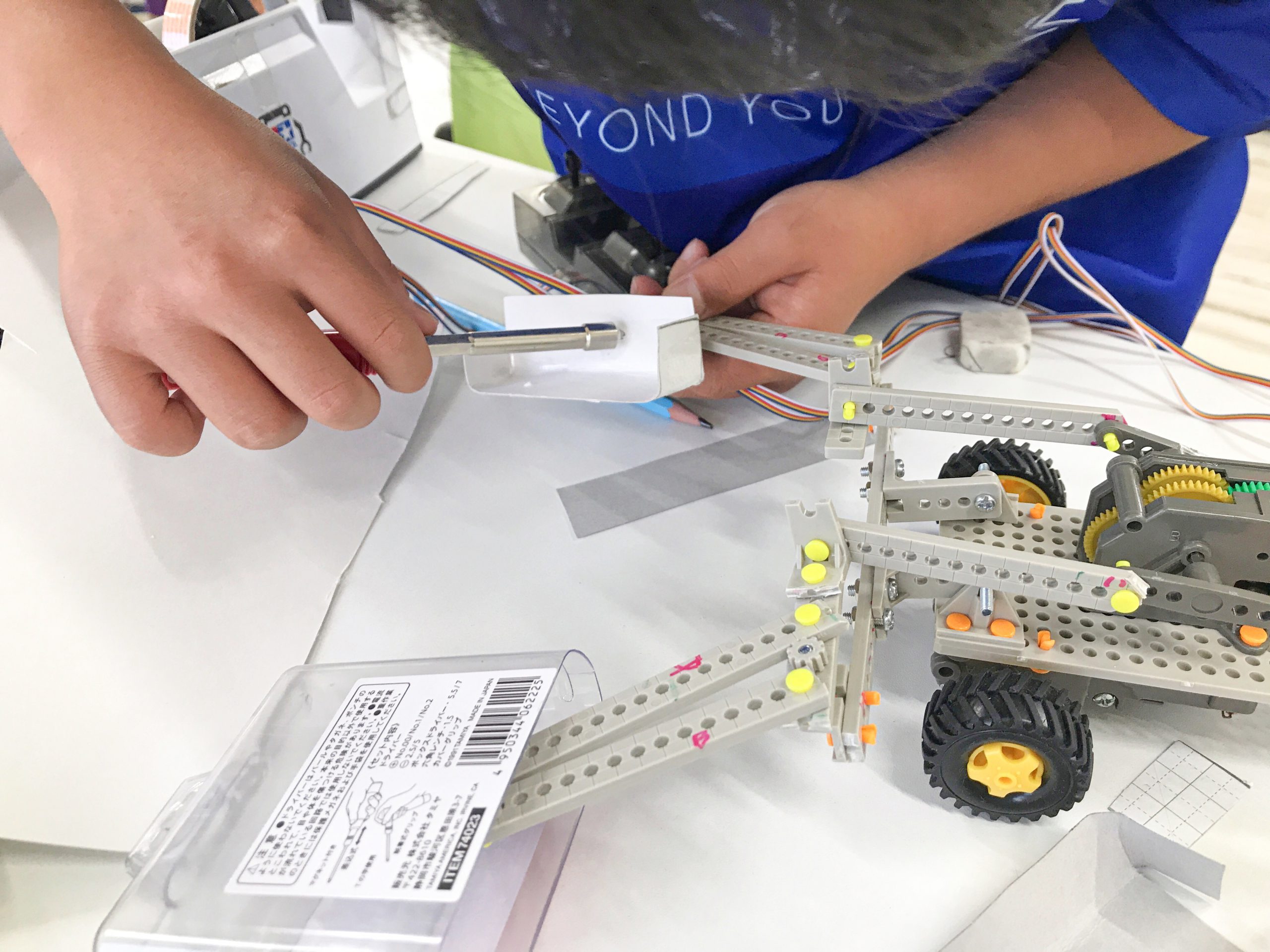
すると隣の子が、「ビスとナットでやれば、ちゃんと固定できるんじゃない?」と気が付きました。
このパーツは使えない→どうしようかな?→他のパーツで試して成功!
これまでのロボット製作の知識と経験を活かす事ができましたね✨
これですね。すべてこれだと思うんです。
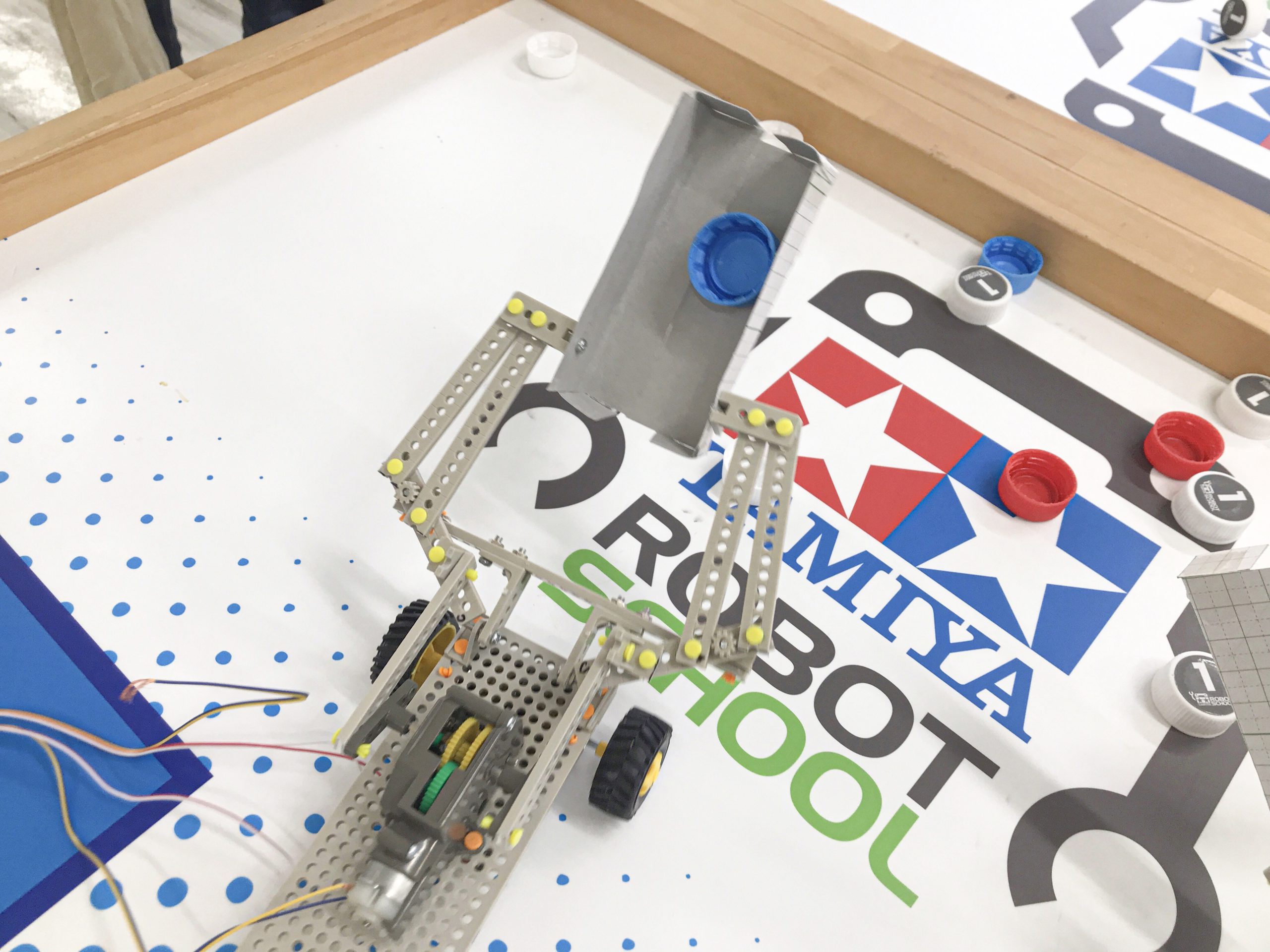
完成後、実際にキャップを取ってみると・・・
しっかりハコ型のスコップで取ることが出来ました☆

こちらはスコップの下にクリアファイルをつけ、ツルツルにしてキャップをすくいやすいように工夫しました☆
見本をベースに自分ならこうしたい!何かオリジナルアイデアをつけてみたい!とポジティブです。
こちらはスコップの上にも画用紙でフタをつけ、アームを閉じたら運ぶときに落ちないようにしました。
このタイプは初めて見ました。運ぶときに落ちてしまうと悲しいですからね。そういう過去の経験をカバーするアイデアだったのでしょう。
その時には同行するわけではないですが、経験したことが脳の引き出しにきちんと整理してしまわれていたんでしょうね。
ここぞの時に、きっちりと活用できました。

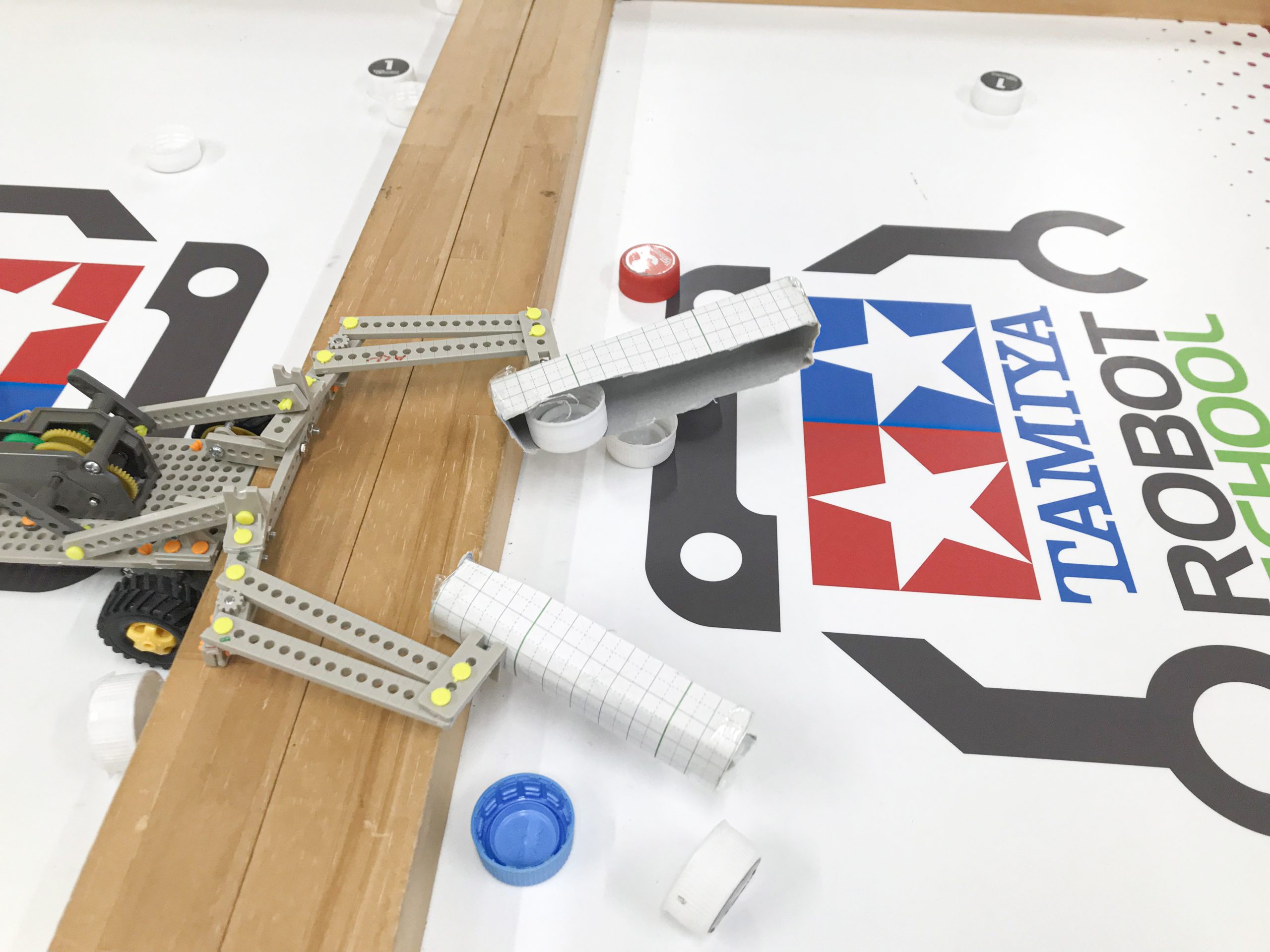
こちらはスコップの前方でもすくえるようにハコ型にせず、折り目をつけてすくいやすいように工夫☆
どれ一つとしてかぶらないロボットになってますね。

こちらはスコップ部分にスポンジも付けて、取りやすいように工夫しました☆
どうしてそこ思いついたの?ってアイデアが子どもたちの柔らか脳からどんどんあふれ出してきます。
いいロボットがたくさんできました。
みんなそれぞれにアイデアをカタチにして、きっちりと改造することが出来ました。
実際に試合をやってみて、小さなスポンジの時よりどれくらい強くなった・取りやすくなったかも検証してもらいます。
初めて改造した自分専用ののマシンで戦えることが嬉しいようで、とても熱戦でした☆
これから更に改造していくので、それぞれが他の子とは異なるマシンになっていきます。
みんなのマシンが強くなるよう、先生たちもサポートしていくので改造を頑張っていこうね♪
そして、9月の東京での全国大会で旋風を巻き起こそう!


